《高中物理教學(xué)論文 電磁感應(yīng)中的能量轉(zhuǎn)化與守恒》由會(huì)員分享��,可在線閱讀�����,更多相關(guān)《高中物理教學(xué)論文 電磁感應(yīng)中的能量轉(zhuǎn)化與守恒(4頁珍藏版)》請?jiān)谘b配圖網(wǎng)上搜索��。
1���、電磁感應(yīng)中的能量轉(zhuǎn)化與守恒
能的轉(zhuǎn)化與守恒定律,是自然界的普遍規(guī)律,也是物理學(xué)的重要規(guī)律.電磁感應(yīng)中的能量轉(zhuǎn)化與守恒問題,是高中物理的綜合問題,也是高考的熱點(diǎn)�、重點(diǎn)和難點(diǎn).在電磁感應(yīng)現(xiàn)象中,外力克服安培力做功,消耗機(jī)械能,產(chǎn)生電能,產(chǎn)生的電能是從機(jī)械能轉(zhuǎn)化而來的;當(dāng)電路閉合時(shí),感應(yīng)電流做功,消耗了電能,轉(zhuǎn)化為其它形式的能,如在純電阻電路中電能全部轉(zhuǎn)化為電阻的內(nèi)能,即放出焦耳熱,在整個(gè)過程中,總能量守恒.
在與電磁感應(yīng)有關(guān)的能量轉(zhuǎn)化與守恒的題目中,要明確什么力做功與什么能的轉(zhuǎn)化的關(guān)系,它們是: 合力做功=動(dòng)能的改變��;
重力做功=重力勢能的改變��;重力做正功,重力勢能減少��;重力做負(fù)功,重力勢
2、能增加��;
彈力做功=彈性勢能的改變����;彈力力做正功,彈性勢能減少;彈力做負(fù)功,彈性勢能增加����;
電場力做功=電勢能的改變;電場力做正功,電勢能減少�����;電場力做負(fù)功,電勢能增加�����;
安培力做功=電能的改變, 安培力做正功,電能轉(zhuǎn)化為其它形式的能;安培力做負(fù)功(即克服安培力做功), 其它形式的能轉(zhuǎn)化為電能.
以2020年高考題為例,說明與電磁感應(yīng)有關(guān)的能量轉(zhuǎn)化與守恒問題的解法.
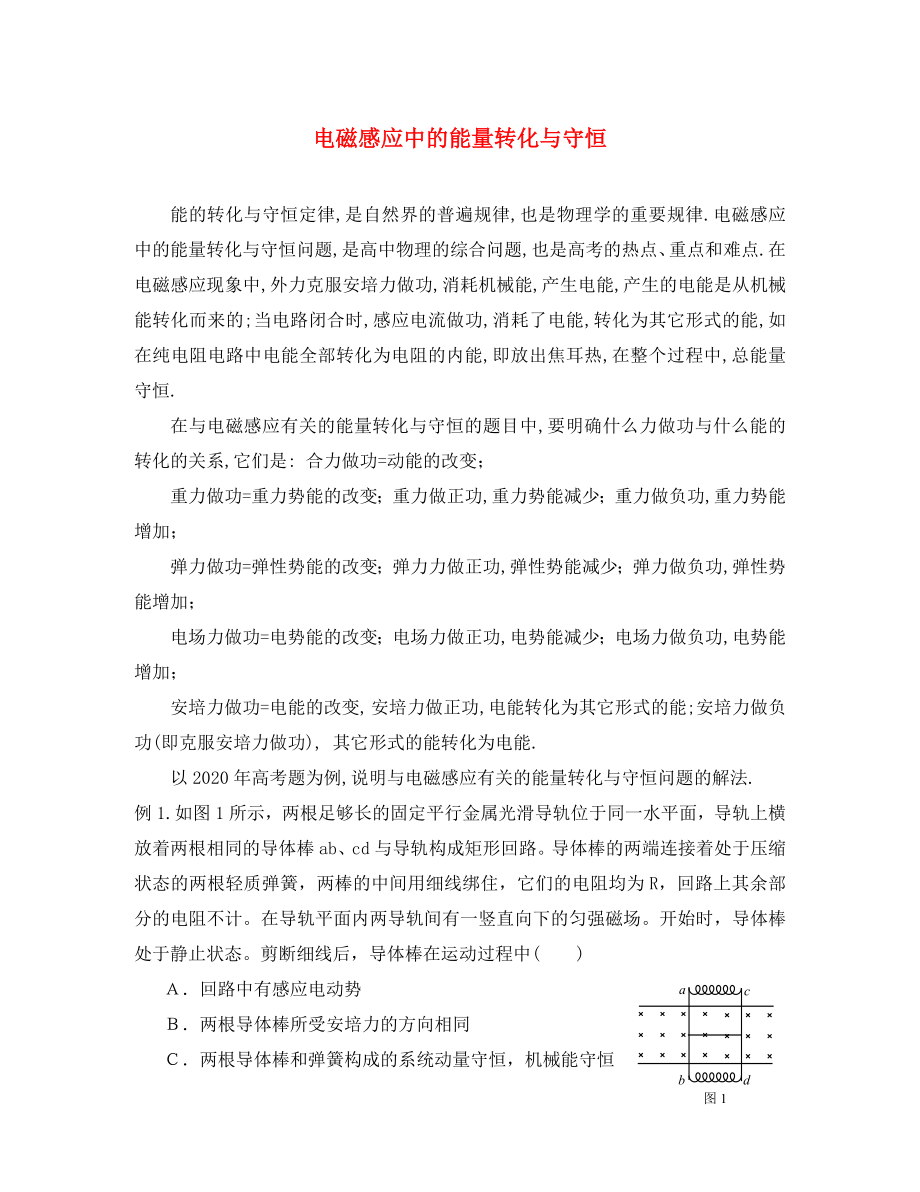
例1.如圖1所示��,兩根足夠長的固定平行金屬光滑導(dǎo)軌位于同一水平面��,導(dǎo)軌上橫放著兩根相同的導(dǎo)體棒ab��、cd與導(dǎo)軌構(gòu)成矩形回路����。導(dǎo)體棒的兩端連接著處于壓縮狀態(tài)的兩根輕質(zhì)彈簧,兩棒的中間用細(xì)線綁住�����,它們的電阻均為R��,回路上其余
3���、部分的電阻不計(jì)���。在導(dǎo)軌平面內(nèi)兩導(dǎo)軌間有一豎直向下的勻強(qiáng)磁場。開始時(shí)���,導(dǎo)體棒處于靜止?fàn)顟B(tài)�。剪斷細(xì)線后�,導(dǎo)體棒在運(yùn)動(dòng)過程中( )
a
c
b
d
圖1
A.回路中有感應(yīng)電動(dòng)勢
B.兩根導(dǎo)體棒所受安培力的方向相同
C.兩根導(dǎo)體棒和彈簧構(gòu)成的系統(tǒng)動(dòng)量守恒,機(jī)械能守恒
D.兩根導(dǎo)體棒和彈簧構(gòu)成的系統(tǒng)動(dòng)量守恒�����,機(jī)械能不守恒
解:因回路中的磁通量發(fā)生變化(因面積增大,磁通量增大)所以有感應(yīng)電動(dòng)勢;據(jù)楞次定律判斷,感生電流的方向是a,用左手定則判斷ab受安培力向左,dc受安培力向右;因平行金屬導(dǎo)軌光滑,所以兩根導(dǎo)體棒和彈簧構(gòu)成的系統(tǒng)受合外力為零(重力與支持力平衡),所以動(dòng)量守
4��、恒,但一部分機(jī)械能轉(zhuǎn)化為電能,所以機(jī)械能不守恒,因此本題選A、D.
例2.如圖2所示���,固定的水平光滑金屬導(dǎo)軌����,間距為L�����,左端接有阻值為R的電阻��,處在方向豎直�、磁感應(yīng)強(qiáng)度為B的勻強(qiáng)磁場中,質(zhì)量為m的導(dǎo)體棒與固定彈簧相連�����,放在導(dǎo)軌上��,導(dǎo)軌與導(dǎo)體棒的電阻均可忽略.初始時(shí)刻��,彈簧恰處于自然長度�����,導(dǎo)體棒具有水平向右的初速度v0.在沿導(dǎo)軌往復(fù)運(yùn)動(dòng)的過程中����,導(dǎo)體棒始終與導(dǎo)軌垂直并保持良好接觸.
(1)求初始時(shí)刻導(dǎo)體棒受到的安培力.
(2)若導(dǎo)體棒從初始時(shí)刻到速度第一次為零時(shí),彈簧的彈性勢能為Ep��,則這一過程中安培力所做的功W1和電阻R上產(chǎn)生的焦耳熱Q1分別為多少?
(3)導(dǎo)體棒往復(fù)運(yùn)動(dòng)��,最終將靜止于
5���、何處?從導(dǎo)體棒開始運(yùn)動(dòng)直到最終靜止的過程中�����,電阻R上產(chǎn)生的焦耳熱Q為多少?
A
解(1)用右手定則判斷導(dǎo)體棒的感生電流方向從B向A, 用右手定則判斷導(dǎo)體棒受的安培力方向向左.
感應(yīng)電動(dòng)勢為
感生電流為
安培力為
B
所以. 圖2
(2) 這一過程中導(dǎo)體棒的動(dòng)能轉(zhuǎn)化為彈簧的彈性勢能和電路的電能(通過安培力做功), 電路的電能通過電阻R轉(zhuǎn)化為焦耳熱,所以
(3)只有導(dǎo)體棒的動(dòng)能為零并且彈簧的彈性勢能也為零,導(dǎo)體棒才能靜止,所
6��、以最終將靜止于初始位置.此時(shí),導(dǎo)體棒的動(dòng)能全部轉(zhuǎn)化為電阻R上產(chǎn)生的焦耳熱,所以.
R1
R2
l
a
b
M
N
P
Q
B
v
例3.圖3中MN和PQ為豎直方向的兩平行長直金屬導(dǎo)軌�����,間距l(xiāng)為0.40m�,電阻不計(jì)��。導(dǎo)軌所在平面與磁感應(yīng)強(qiáng)度B為0.50T的勻強(qiáng)磁場垂直�。質(zhì)量m為6.0×10-3kg���、電阻為1.0Ω的金屬桿ab始終垂直于導(dǎo)軌,并與其保持光滑接觸����。導(dǎo)軌兩端分別接有滑動(dòng)變阻器和阻值為3.0Ω的電阻R1。當(dāng)桿ab達(dá)到穩(wěn)定狀態(tài)時(shí)以速率v勻速下滑����,整個(gè)電路消耗的電功率P為0.27W,重力加速度取10m/s2����,試求速率v和滑動(dòng)變阻器接入電路部分的阻值R2。
解:
7���、在桿ab達(dá)到穩(wěn)定狀態(tài)以前,桿加速下降,重力勢能轉(zhuǎn)化為
動(dòng)能和電能.當(dāng)桿ab達(dá)到穩(wěn)定狀態(tài)(即勻速運(yùn)動(dòng))時(shí),導(dǎo)體棒克
服安培力做功,重力勢能轉(zhuǎn)化為電能,即電路消耗的電功,所以有
代入數(shù)據(jù)得:.
感應(yīng)電動(dòng)勢為
感生電流為 圖3
其中r為ab的電阻,R外為R1與R2的并聯(lián)電阻,即.
又
代入數(shù)據(jù),解得:R2=6.0.
例4.如圖4所示���,處于勻強(qiáng)磁場中的兩根足夠長、電阻不計(jì)的平行金屬導(dǎo)軌相距1m���,導(dǎo)軌平面與水平面成θ=37o角���,下端連接阻值為R的電阻。勻強(qiáng)磁場方向與導(dǎo)軌平面垂直���。質(zhì)量為0.2k
8�����、g�����,電阻不計(jì)的金屬棒放在兩導(dǎo)軌上��,棒與導(dǎo)軌垂直并保持良好接觸��,它們之間的動(dòng)摩擦因數(shù)為0.25�����。
⑴求金屬棒沿導(dǎo)軌由靜止開始下滑時(shí)的加速度大?�?;
⑵當(dāng)金屬棒下滑速度達(dá)到穩(wěn)定時(shí)���,電阻R消耗的功率為8W�,求該速度的大小�����;
a
b
θ
θ
R
⑶在上問中���,若R=2Ω��,金屬棒中的電流方向由a到b���,求磁感應(yīng)強(qiáng)度的大小和方向。
(g=10m/s2�,sin37o=0.6,cos37o=0.8)
解:(1)由受力分析,根據(jù)牛頓第二定律,得:
代入數(shù)據(jù),解得. 圖4
(2) 當(dāng)金屬棒下滑速度達(dá)到穩(wěn)定時(shí), 金屬棒重力勢能一部分克服摩擦力做功,轉(zhuǎn)化為內(nèi)能,另一部分克服安培力做功,轉(zhuǎn)化為電能,它等于電路中電阻R消耗的電功;設(shè)速度為,在時(shí)間內(nèi),據(jù)能量守恒,有:
代入數(shù)據(jù),解得:
(3)據(jù) 及,解得B=0.4T.
用右手定則判斷磁場方向垂直導(dǎo)軌平面向上.
歸納:在同一水平面內(nèi),重力勢能不變,動(dòng)能與電能之和守恒,如例2;物體做勻速運(yùn)動(dòng)時(shí),其動(dòng)能不變,勢能與電能之和守恒,如例1和例3;如果再有克服摩擦力做功,則勢能�、內(nèi)能與電能之和守恒,如例4.在電磁感應(yīng)現(xiàn)象中,機(jī)械能不守恒.
 高中物理教學(xué)論文 電磁感應(yīng)中的能量轉(zhuǎn)化與守恒
高中物理教學(xué)論文 電磁感應(yīng)中的能量轉(zhuǎn)化與守恒