《L6205開(kāi)發(fā)板_步進(jìn)電機(jī)控制入門講解3.00》由會(huì)員分享�,可在線閱讀,更多相關(guān)《L6205開(kāi)發(fā)板_步進(jìn)電機(jī)控制入門講解3.00(28頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1、步進(jìn)電機(jī)控制入門http:/ 步進(jìn)電機(jī)控制入門-前言http:/摘自一位網(wǎng)友的話: 以前我總以為步進(jìn)電機(jī)是一種即將被淘汰的玩意���,即便是使用細(xì)分技術(shù)�����,同樣會(huì)遇到丟步����、振動(dòng)��、發(fā)熱�、響應(yīng)慢等問(wèn)題。偶然的機(jī)會(huì)做了個(gè)閉環(huán)驅(qū)動(dòng)的實(shí)驗(yàn)�,在其后面加裝了一個(gè)1000線的編碼器��,步進(jìn)電機(jī)通過(guò)編碼器獲得轉(zhuǎn)子位置變換為矢量驅(qū)動(dòng)當(dāng)檢測(cè)到位置偏差時(shí)提供驅(qū)動(dòng)輸出���,到位后可以用極低的電流維持鎖定初步試驗(yàn)達(dá)到了近似交流伺服的的效果,嚴(yán)格的來(lái)說(shuō)在低速定位應(yīng)用中�����,比伺服還要好���!因?yàn)椴竭M(jìn)電機(jī)在低速時(shí)的力矩更大����,而且鎖定后不會(huì)像伺服電機(jī)那樣在某個(gè)位置微震閉環(huán)驅(qū)動(dòng)之后的步進(jìn)電機(jī)消除了丟步�����、振動(dòng)����、發(fā)熱等缺點(diǎn)���,還可以成倍的提高轉(zhuǎn)速���,響應(yīng)速度
2����、也非??欤¢]環(huán)步進(jìn)驅(qū)動(dòng)其產(chǎn)品的介紹:主要特點(diǎn):1�����、高響應(yīng) 與開(kāi)環(huán)控制步進(jìn)電機(jī)一樣��,Astep與脈沖命令同步運(yùn)行��,因此能使短行程可在短時(shí)間內(nèi)精確定位��。2���、增益調(diào)整簡(jiǎn)單影響伺服系統(tǒng)使用的效果��,不僅與伺服系統(tǒng)本身的性能有很大的關(guān)系�,而且調(diào)整伺服系統(tǒng)的增益也非常關(guān)鍵��,但調(diào)整增益是一件既繁瑣又費(fèi)時(shí)的事���。Astep的調(diào)整非常簡(jiǎn)單�����,只需要調(diào)整一個(gè)撥碼開(kāi)關(guān)即可����。它尤其適合于低剛性傳動(dòng)的應(yīng)用,如同步帶+滑輪等運(yùn)動(dòng)結(jié)構(gòu)���。3�����、停止無(wú)波動(dòng)Astep的控制電機(jī)為步進(jìn)電機(jī)�,由于步進(jìn)電機(jī)停止時(shí)具有保持轉(zhuǎn)矩特性����,因此,當(dāng)停止時(shí)����,電機(jī)位置保持完全不變且無(wú)波動(dòng)����,對(duì)于在停止時(shí)要求有不能振動(dòng)的應(yīng)用場(chǎng)合是一個(gè)非常理想的解決方案�����,如機(jī)器
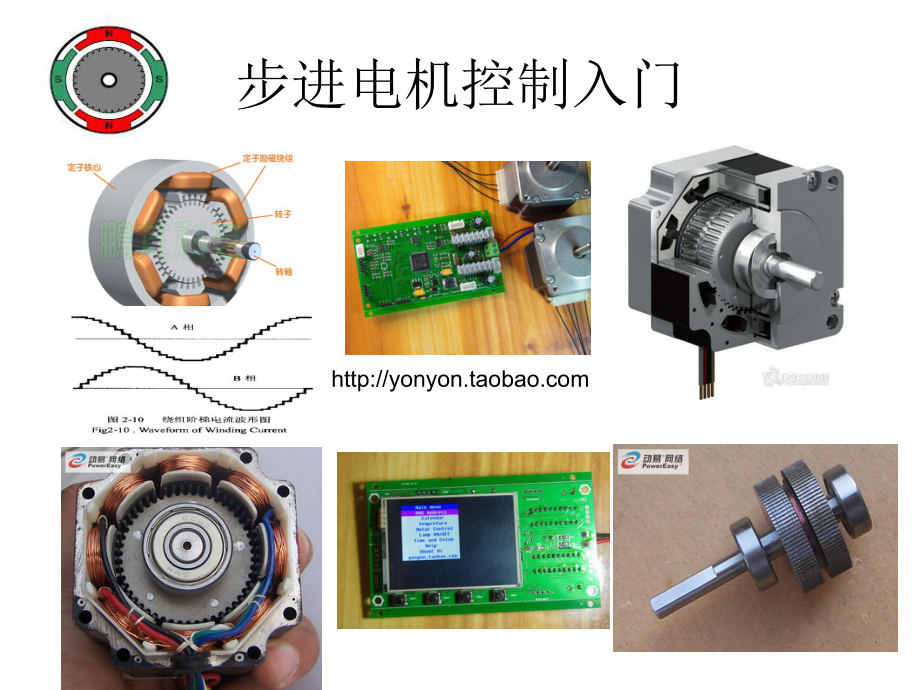
3����、視覺(jué)��、圖像檢測(cè)等行業(yè)�。4、低速低振動(dòng)由于驅(qū)動(dòng)器采用了獨(dú)特先進(jìn)的電流矢量控制技術(shù)���,平滑的效果可比得上細(xì)分驅(qū)動(dòng)的效果����,在低速運(yùn)行時(shí)����,振動(dòng)也是非常小的。 步進(jìn)電機(jī)入門控制講解1.步進(jìn)電機(jī)結(jié)構(gòu)-混合式步進(jìn)電機(jī)2.細(xì)分控制原理3.H橋驅(qū)動(dòng)方法 驅(qū)動(dòng) L6205為例4.矢量控制5.加減速度控制6.衰減模式 細(xì)分控制原理1.在一步中�,二個(gè)線圈 給不同的電流 形成的合力的夾角 ,就形成了步進(jìn)電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng)的角度, 來(lái)達(dá)到細(xì)分的目的����。2.如果單純給脈沖 一個(gè)脈沖只能走一步 ,然后停下來(lái)���,在一個(gè)新的平衡位置����。3.不斷的給這二個(gè)線圈加以 相位90度的正弦波����,步進(jìn)電機(jī)就開(kāi)始轉(zhuǎn)動(dòng)起來(lái)了。(以二相4拍混合式步進(jìn)電機(jī)為例�,三
4、相相差120度)二相四拍 步進(jìn)電機(jī)驅(qū)動(dòng)波形 步進(jìn)電機(jī)控制入門 步進(jìn)電機(jī)控制入門4相8拍 驅(qū)動(dòng)波形 步進(jìn)電機(jī)控制入門 步進(jìn)電機(jī)控制入門1.L6205+L6506 才能恒流驅(qū)動(dòng) 或是采用恒流功能的DRV8841 (電流略小一點(diǎn))2.恒流驅(qū)動(dòng)的好處 就是慢速的時(shí)候基本不受電機(jī)電感的影響�,使得微步距比較均勻。3.當(dāng)然為了降低成本 直接采用H橋也是可行的���。4.下面就以L6205為例 SPWM控制5.右圖 正弦波 就代表 PWM占空比的多少6.占空比為100 和0%時(shí)為最大力矩 50% 電流為0 SIN-SIN =SIN 原理 高電平減去低電平時(shí)導(dǎo)通 的 電流就是此時(shí)的電流�����。然后將這個(gè)占空比依次調(diào)整為按正
5���、弦變化。7.L6205已經(jīng)包含1US死區(qū)����,如果是其它MOS需要插入死區(qū) 以免H橋損壞。 矢量控制T0 T1 T3T2速度位置 1.當(dāng)目標(biāo)位置T2 當(dāng)前位置T0 加速 勻速 到指定位置T2V1 V2 V3 矢量控制1.V1 V2 最高速度��? 為總行程的 1/3 少 或更少 根需要 還有負(fù)載情況 2.V3 什么時(shí)候減速����? 加速多少 減速多少。這要根據(jù)負(fù)載情況3.關(guān)于負(fù)載的計(jì)算 這里舉例 克服摩擦做功的例子 步進(jìn)電機(jī)啟動(dòng)頻率1.步進(jìn)電機(jī) 空載啟動(dòng)頻率 一般可以到 1KHZ2.但是根據(jù)帶負(fù)載的不同 會(huì)有所降低 需要實(shí)際測(cè)試����。3.下面是計(jì)算方法 4.為了快速平穩(wěn)到達(dá)目標(biāo)位置 過(guò)低太慢,過(guò)高失步�����。要適中�����。
6�、 加減速度控制1.用計(jì)算機(jī) 計(jì)算 查表方法 計(jì)算快速2.根據(jù)需要采用離散法 對(duì)S曲線 擬合���。 為方便使用已經(jīng)整理成上位機(jī)軟件。 步進(jìn)電機(jī)加速控制 1.步進(jìn)電機(jī) 多數(shù)矩頻特性 也就是力矩曲線 就指數(shù)下降型2.那么我們加用加速曲線 也應(yīng)該用指數(shù)曲線型 低數(shù)加速快�,高速加速慢3.為了獲得更好的剎車效果 可以將指數(shù)曲線優(yōu)化 稍微像一個(gè)S型4.帶負(fù)載啟動(dòng)時(shí) 要比啟動(dòng)頻率低 ,正常運(yùn)轉(zhuǎn)又要比最高頻率低���。5.如下圖 1.2.3. H橋驅(qū)動(dòng) 衰減模式運(yùn)動(dòng)控制系統(tǒng)里匹配步進(jìn)電機(jī)和驅(qū)動(dòng)器的5個(gè)簡(jiǎn)單步驟: 1. 選擇合適的電機(jī)(基于對(duì)速度和轉(zhuǎn)矩的要求)��。 2. 確認(rèn)電機(jī)技術(shù)指標(biāo)中各相電感之間誤差在5%以內(nèi)��。 3.
7����、選擇合適的驅(qū)動(dòng)器�����。如果可能的話���,獲得驅(qū)動(dòng)器輸出的電流波形圖���。 4. 確認(rèn)驅(qū)動(dòng)器上有提高運(yùn)行平穩(wěn)性的功能或者選項(xiàng),如調(diào)節(jié)續(xù)流阻尼深度(慢速或者快速電流衰減)或可調(diào)整電流波形的電位器�����。 5. 根據(jù)驅(qū)動(dòng)器特性匹配電機(jī)電感量。通常說(shuō)來(lái)��,高電感量電機(jī)低速性能較好�,但是需要驅(qū)動(dòng)器具備高電流阻尼(快速續(xù)流)�����,能讓電流在續(xù)流期間快速下降�。阻尼有助于電感的快速放電。低電感量電機(jī)高速性能好�����,如果驅(qū)動(dòng)器能提供較低的電流阻尼(慢速續(xù)流)��,那么這些電機(jī)將呈現(xiàn)出良好的工作特性�,因?yàn)樗麄冊(cè)陔姼心芰啃狗胚^(guò)程中無(wú)需特別的阻尼幫助。對(duì)于一些電感量中等的電機(jī)來(lái)說(shuō)���,可以選擇具備混合續(xù)流能力的驅(qū)動(dòng)器����。 6.電機(jī)快速時(shí) 一般采用快速衰減
8、模式 低速時(shí)采用慢速衰減模式�。 7.現(xiàn)在的步進(jìn)電機(jī)細(xì)分的方式基本上都是電流細(xì)分法,將相電流按正弦波相切得到的電流點(diǎn)作為細(xì)分點(diǎn)�����。在相電流達(dá)到細(xì)分點(diǎn)時(shí)就要控制電流進(jìn)行控制衰減��,否則得話就會(huì)出現(xiàn)角度過(guò)沖也就無(wú)法準(zhǔn)確的停留在細(xì)分角度上���。電機(jī)的速度不同選擇的衰減模式不同�����。高速時(shí)快衰減��、低速時(shí)慢衰減�。高速時(shí)慢衰減就會(huì)出現(xiàn)震動(dòng)大��、噪音高等問(wèn)題���。低速時(shí)選擇快衰減就會(huì)導(dǎo)致電機(jī)無(wú)力嚴(yán)重時(shí)會(huì)出現(xiàn)定位不準(zhǔn)��。電機(jī)控制IC上的電流衰減所針對(duì)的是H橋開(kāi)關(guān)管的控制模式�����。慢衰減時(shí)高側(cè)管關(guān)閉�����,快衰減時(shí)高低側(cè)管都關(guān)閉�。混合衰減是先是以快速衰減然后以慢速衰減�,混合衰減的時(shí)間比例因芯片和功率也個(gè)不相同���。 H橋驅(qū)動(dòng) 衰減模式電流衰減模式
9�����、特點(diǎn)及應(yīng)用緩慢衰減模式的特點(diǎn):馬達(dá)在緩慢衰減時(shí)由于輸出電流穩(wěn)定的減少����,所以電流的波紋會(huì)比較小�,對(duì)馬達(dá)轉(zhuǎn)距會(huì)比較有利,但是在小電流的領(lǐng)域里����,會(huì)因?yàn)殡娏鞯目刂茞夯斐奢敵鲭娏髟黾?��,而且在半步進(jìn)、四分之一步進(jìn)模式下容易受到高脈沖頻率驅(qū)動(dòng)時(shí)馬達(dá)反向電動(dòng)勢(shì)的影響�,所以它不會(huì)隨著電流限制值的變化而變化,會(huì)造成電流波形變形和馬達(dá)震動(dòng)�����。所以它比較適合在全步進(jìn)模式或者低脈沖頻率驅(qū)動(dòng)時(shí)的半步進(jìn)模式�����、四分之一步進(jìn)模式使用���?�?焖偎p模式的特點(diǎn) 馬達(dá)在快速衰減時(shí)由于輸出電流急速減少���,所以可以減低在高速驅(qū)動(dòng)時(shí)電流波形的變形,但是輸出電流的波紋會(huì)變大這會(huì)使平均電流下降(可以加大電流限制值來(lái)改善����,但是也要考慮到輸出額定電流)
10、,造成:馬達(dá)轉(zhuǎn)距的降低���;馬達(dá)的損失變大�����,增加發(fā)熱�。在沒(méi)有和的問(wèn)題下適合高速驅(qū)動(dòng)的半步和四分之一步模式��?���;旌纤p模式的特點(diǎn)混合衰減模式就是針對(duì)于上面所說(shuō)的緩慢衰減模式、快速衰減模式所發(fā)生問(wèn)題的改善方式�。在混合衰減模式中電流衰減因?yàn)榭焖偎p和緩慢衰減的切換不會(huì)造成紋波電流的增大�,可以改善電流的控制性. 快速衰減 力矩會(huì)變小慢速衰減力矩會(huì)曾大 步進(jìn)電機(jī)控制入門 步進(jìn)電機(jī)控制入門上位機(jī)軟件 配合前面所講的 速度計(jì)算公式 主要用的是第一行 C0 K0 B0 叁考公式 C0*K0 x+B0 速度曲線理論見(jiàn)上面 大體流程 T2 T8 定時(shí)器用于產(chǎn)生PWM 從而生成SVPWM T1 為速度控制定時(shí)器 T3 T
11、5預(yù)留8個(gè)電機(jī)速度控制 停止時(shí)電流和運(yùn)行電流控制 電機(jī)位置控制函數(shù) (應(yīng)用層函數(shù))指定位置 電機(jī)自動(dòng)加減速 正反轉(zhuǎn)控制 MotorXControl(RXDData1*255); MotorYControl(RXDData2*255); 高8BIT 低8BIT MotorXDmxDataControl(RXDData1,0); /DMX512測(cè)試 ok MotorYDmxDataControl(RXDData2,0); 根據(jù)位置控制速度根據(jù)位置控制速度,底層應(yīng)用函數(shù)參數(shù)為:電機(jī)方向, 用于控制速度的啟動(dòng) 制動(dòng)位置 Motor1_drive(Motor1_speed_postion_dir,MotorXSpeedPos); 細(xì)分控制及計(jì)算MotorPositionPointer 細(xì)分控制 計(jì)算例子TIM2-CCR1 = SinDataAMotorPositionPointer1;SinDataA 1024 個(gè)數(shù)據(jù) 2PI 個(gè)周期 1024/4/16= 16 細(xì)分 步進(jìn)電機(jī)控制入門 1.步進(jìn)電機(jī)控制相對(duì)復(fù)雜 涉及程序�,電子,數(shù)學(xué)�,物理,以及材料等���,這里只是用通俗簡(jiǎn)單語(yǔ)言�����,講怎么去控制步進(jìn)電機(jī)�����,希望對(duì)入門的朋友有用�����。 2.有不對(duì)的地方��,還請(qǐng)大家指正�,多謝! 3.最后感謝大家看完��,多提寶貴意見(jiàn)����。 步進(jìn)電機(jī)控制入門 QQ 交流群:121960步進(jìn)電機(jī)控制開(kāi)發(fā)板 http:/
 L6205開(kāi)發(fā)板_步進(jìn)電機(jī)控制入門講解3.00
L6205開(kāi)發(fā)板_步進(jìn)電機(jī)控制入門講解3.00