《畢業(yè)設(shè)計(jì)-機(jī)械手臂控制系統(tǒng).ppt》由會(huì)員分享�,可在線閱讀,更多相關(guān)《畢業(yè)設(shè)計(jì)-機(jī)械手臂控制系統(tǒng).ppt(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索����。
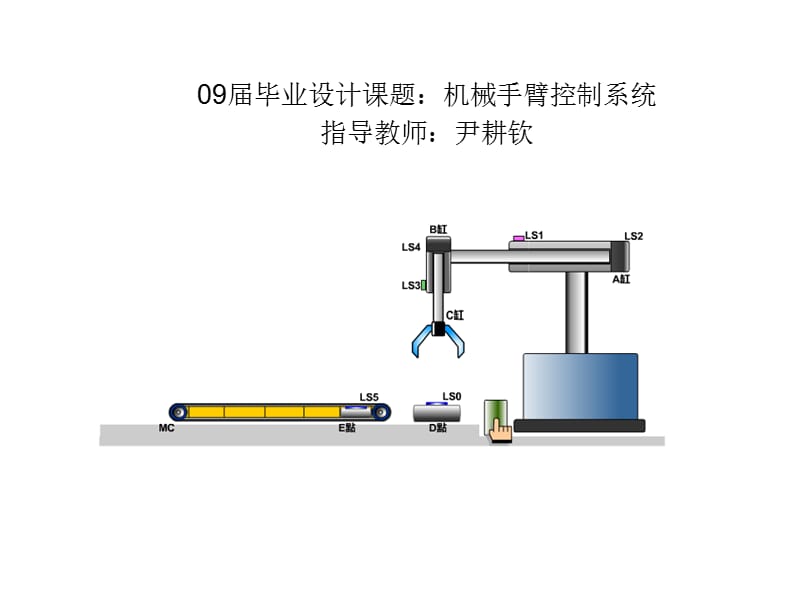
09屆畢業(yè)設(shè)計(jì)課題:機(jī)械手臂控制系統(tǒng)指導(dǎo)教師:尹耕欽,機(jī)械手臂控制系統(tǒng)控制說(shuō)明:,工件的補(bǔ)充使用人工控制�����,可直接將工件放在D點(diǎn)(LS0動(dòng))�。 只要D點(diǎn)有工件��,機(jī)械手臂即先下降(B缸動(dòng)作)將工件抓?。–缸動(dòng)作)后上升(B缸復(fù)位)�,再將工件搬運(yùn)(A缸動(dòng)作)到E點(diǎn)上 方,機(jī)械手臂再次下降(B缸動(dòng)作)后放開(kāi)(C缸復(fù)位)工件,機(jī)械手臂上升(B缸復(fù)位)���,最后機(jī)械手臂再回到原點(diǎn)(A缸復(fù)位)��。 A,B,C缸均為單作用氣缸����,使用電磁控制。 C缸在抓取或放開(kāi)工件后�����,都需有1秒的間隔,機(jī)械手臂才能動(dòng)作�。 當(dāng)E點(diǎn)有工件且B缸已上升到LS4時(shí),傳送帶電機(jī)轉(zhuǎn)動(dòng)以運(yùn)走工件���,經(jīng)2秒后傳送帶電機(jī)自動(dòng)停止����。工件若未完全運(yùn)走(計(jì)時(shí)未到)時(shí),則應(yīng)等待傳送帶電機(jī)停止后才能將工件移走�����。 LS0D點(diǎn)有無(wú)工件偵測(cè)用限制開(kāi)關(guān); LS1A缸前行限制開(kāi)關(guān)(左極限)LS2A缸退回限制開(kāi)關(guān)(右極限) LS3B缸下降限制開(kāi)關(guān)(下極限) LS4B缸上升限制開(kāi)關(guān)(上極限)LS5E點(diǎn)有無(wú)工件偵測(cè)用限制開(kāi)關(guān),畢業(yè)設(shè)計(jì)(論文)課題要求:,1��、對(duì)控制系統(tǒng)進(jìn)行控制說(shuō)明和功能分析���; 2���、控制系統(tǒng)元件分配和PLC規(guī)格型號(hào)的選擇 ; 3���、 PLC輸入輸出端口設(shè)置����; 4、狀態(tài)表的分析��; 5����、繪制順序功能圖SFC; 6���、將順序功能流程轉(zhuǎn)換為步進(jìn)梯形圖,然后將程序錄入計(jì)算機(jī)并下載到PLC,進(jìn)行最后的調(diào)試�����。 7�����、按照論文格式的要求撰寫(xiě)論文��,字?jǐn)?shù)在4000字以上����。,
 畢業(yè)設(shè)計(jì)-機(jī)械手臂控制系統(tǒng).ppt
畢業(yè)設(shè)計(jì)-機(jī)械手臂控制系統(tǒng).ppt