《準(zhǔn)靜態(tài)過(guò)程氣體體積變化與做功的關(guān)系》由會(huì)員分享,可在線閱讀����,更多相關(guān)《準(zhǔn)靜態(tài)過(guò)程氣體體積變化與做功的關(guān)系(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1����、| 維普資訊 h ttp://
| 維普資訊 h ttp://
VcL37 No」弋
Jan-Feb.2008
屮二MF敎婁參考
査奏輔導(dǎo)
? n I ? I ? l,il ?? I ■ ■■ .1 ?FF ■ I .1 ■ I ■■ H I
| 維普資訊 h ttp://
| 維普資訊 h ttp://
準(zhǔn)靜態(tài)過(guò)程氣価飾積變化與做m的關(guān)系
陳雅
(遼蘇省南通市第二中學(xué) 226002)
| 維普資訊 h ttp://
| 維普資訊 h ttp://
S 3
—、準(zhǔn)靜杰過(guò)理
系筑由某一
2��、平撕態(tài)畀始變化�,狀態(tài)的變化必然零戡壞平 術(shù),在一定的條件下�����,原來(lái)的平衡態(tài)被破壞品還需耍經(jīng)過(guò)一段 時(shí)間才能達(dá)創(chuàng)新的平衝.這段時(shí)間軼為弛矗時(shí)間.當(dāng)一個(gè)過(guò)程 進(jìn)行的肘間比弛攜時(shí)間大得窖即過(guò)程進(jìn)行得“無(wú)屜緩慢”日趴 便礙過(guò)程中的每一平狀態(tài)都達(dá)利平衡態(tài),這樣的過(guò)程就町認(rèn) 為是準(zhǔn)靜杰過(guò)程一反氣休的準(zhǔn)靜態(tài)壓搭過(guò)程為例?緩慢推進(jìn)活 基壓端氣缸叩的氣體�����,弛璨時(shí)間捋IO_J s.如果壓縮一次斯用 的時(shí)間為】氣則可立認(rèn)為是準(zhǔn)靜態(tài)過(guò)程.準(zhǔn)靜態(tài)過(guò)程足一種 理想化的過(guò)程?尼宴際過(guò)程14無(wú)限緩慢”進(jìn)廳時(shí)的扱限情形和 “投有屋擦阻力”理想條件下的過(guò)程.
顯然����,件為準(zhǔn)斛態(tài)過(guò)程的無(wú)散中間狀態(tài)〔平衝態(tài))?可且用 無(wú)歡組狀態(tài)鞋駅來(lái)
3、描述「可用P*圖上的每一點(diǎn)來(lái)春示這些 平衡態(tài).系現(xiàn)的淮靜畫極化過(guò)程可用蘆“圖上的一條曲線叢 示?稱之為過(guò)程曲線.
二�、理録叫體在準(zhǔn)靜態(tài)過(guò)程中的元功
如圖1所示,若在外力F柞用下曙基邏慢移動(dòng)’則這牛過(guò) 穆就是(近假}準(zhǔn)靜態(tài)過(guò)程:若在力F柞用下�,活塞快逮移 動(dòng)就為非靜態(tài)過(guò)程?這里討論準(zhǔn)靜態(tài)過(guò)程中的理想氣體 膨臓壓堀功與休枳變化的關(guān)系,以膨脹為例��,設(shè)理想%體圖1 對(duì)擁■界做的元功為吐《\則
dA=F * df—/fSd/—/kIVt ①
W= f dW- P���; pdV. ②
」 Jv]
總功評(píng)的數(shù)值軸應(yīng)于少-y閣曲纜下的面枳?如圖Zt
由圖呂舂岀*功評(píng)是過(guò)feft.K數(shù)值與過(guò)程有去?理
4����、程L 2和&中?盡骨始末狀態(tài)都相同.都提從原繪弒態(tài)A孌化到末 狀態(tài)氏但是pl/圖銭下所圈的面積顯旃大小不同�,即三過(guò)程 中外界所做功的數(shù)值不同
三、帆煉怵積變憂與饒功的關(guān)聚
在中讐物理教學(xué)中?一魁研究的是弋體單純過(guò)程*如純等 溫��、等壓*尊容過(guò)程緋�����,根搦②式有
尊容過(guò)程: w= P���; z>dv-o. ③
JV,
�
尊壓過(guò)程’砒二訊丫=扒匕一匕幾
等溫過(guò)程: 吩譏I僉 ?
由③?⑤式可得岀如下結(jié)論:體積不變「不懂功I體積變 大?%休對(duì)外融正功:休積變小』卜界對(duì)%庫(kù)撇功.
但是值得注盤的是+上述結(jié)論是以吒體做單方血化{純等 溫*純等壓或城等容過(guò)程■}得到的.井車具備一嚴(yán)意文.為了對(duì)
5�、 這類問(wèn)膜能有一個(gè)明確的認(rèn)識(shí)t下面通過(guò)兩個(gè)峯方(rt!零個(gè)單 方過(guò)程紐說(shuō)�����,即實(shí)際的任意變化過(guò)程)豈化過(guò)樫進(jìn)打分析.
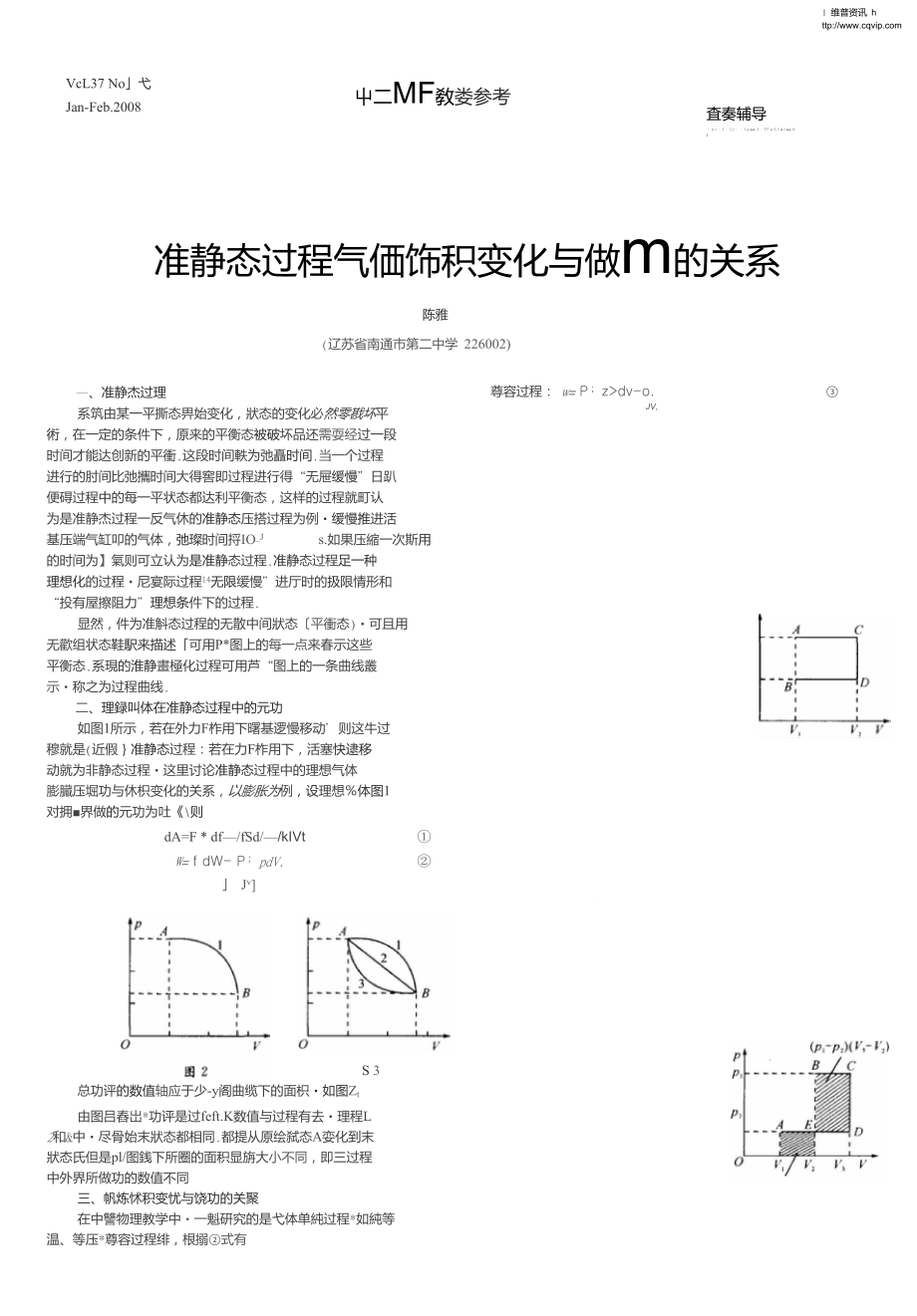
例1 一定質(zhì)駅的理想吒休*由平輪杰A經(jīng)過(guò)-泵列變 化過(guò)程到達(dá)平衡態(tài)£,11有V, = VB p 關(guān)垂.如圖4所示. P��,
A-C為等毘膨脹過(guò)程?外界對(duì) 氣休做功功P: 的大小為圖中矩形ACV,的面 積tC-*D為尊容過(guò)程"不擻功W嚴(yán) G O����;r>*B為等壓壓軸過(guò)程』卜界對(duì)吒 體做功.曬=拱(叭一叭片即圖中 矩形BDV.V,的面積.
那么氣體在整牛過(guò)程中做的總功為
jVi )
6、?冗體對(duì)外撇功?做功栽值大小即圖中拒形
ACDH的面積.
同理���,可以分析出此例的反過(guò)程?即由的變 化過(guò)程中一定有w>0,即總功大于零�,外界對(duì)弐煒做功�,
市此縣町M看出,左氣體累列孌化過(guò)程中'氣體體積最 終沒有發(fā)生變毗����,但氣煉與外界卻有機(jī)械功?而且功的正頁(yè)與 玫程的方向有關(guān).
例2 一定質(zhì)童的理患?xì)庋?由平斷狀態(tài)沖蠱過(guò)一系列 查化過(guò)程到達(dá)平働狀態(tài)冇 叭V*,如圖5所示.如果氣體變 化按AfE—D-YfR的變化過(guò) 程逬存*不難喬出吒怵在這個(gè)變 化過(guò)程中外界對(duì)氣體撇的總功為
^ = -^(VJ-V1}+/h(Vn-V:)
=(R—駅涎巧一卩小一從£吧
一 2
由圖5可匐,如果範(fàn)形DC
7、BE 的面積丈干矩形AEV.V,的面積 值����,則A>0,外界時(shí)吒怵做功;如果矩形IX:BE的而積小于施
| 維普資訊 h ttp://
| 維普資訊 h ttp://
| 維普資訊 h ttp://
E-mail s pby御cfe? 1. can
| 維普資訊 h ttp://
“嫦娥一號(hào)”為何要用紫外月球敏感器定姿
馬平妥
(陜西省富平縣逸山中學(xué) 711700)
| 維普資訊 h ttp://
| 維普資訊 h ttp://
北京時(shí)間叫年10月24日訶時(shí)05分�,我國(guó)在萌鬥衛(wèi)星 畫射中心用松征三號(hào)甲運(yùn)就火箭將円雄蛾一號(hào)”
8、衛(wèi)星成功送人 衣空?這是我國(guó)在席的十七大勝利召開后���,又一令國(guó)人振奮的 大事.也是乳國(guó)就天事業(yè)繼兩彈一址'載人航天后的第三個(gè)里 理碑「橢蟒一號(hào)"是我國(guó)自主化程度璟商的衛(wèi)星�����,有多項(xiàng)技術(shù) 律世界上都是首次應(yīng)用����,紫外月球亀感器定姿就是苴中一項(xiàng). 那么為何耍采用此項(xiàng)扭術(shù)給衛(wèi)星定姿呢�?
我怕知道,控制衛(wèi)星姿態(tài)對(duì)于惺證星上儀器正常工作十 血奧宙于地球有大%丫向外太空有較強(qiáng)烈的紅外輻肘�,所 以通常的胞球人造衛(wèi)星使用紅孫敏翳器對(duì)地面進(jìn)行定姿、定 軌����,從而確宦衛(wèi)星的俯仰和灑動(dòng)姿態(tài).但對(duì)于執(zhí)行繞月飛行任 務(wù)的亠嫦娥 號(hào)S能否便用類徵的姿態(tài)救擢器完砒測(cè)■呢?
不低一因?yàn)樵虑蛏蠜]詢大氣����,熹月廊屋射盍麗的輻射* W
9����、此使用紅外績(jī)感器只能探測(cè)月球本障的紅外輻射.而月球本 體的虹外輻射光譜帶寬和逼度是I?著龍隔的照射方向和操測(cè) 鎖逍的變化而變化的.我捫尚缺乏這方面的試購(gòu)數(shù)擔(dān)�,所以目 盹衛(wèi)星用的紅外地球鍛感番泰以滿足月球探U任務(wù)朗姿態(tài)確 定要求.經(jīng)過(guò)反宣研究月Ifi不同物匱�����、不同地匪的反射特性后 發(fā)現(xiàn):在短說(shuō)借段反射率差別有減小曲趨勞����,建表明如果從紫 外諂段進(jìn)行觀藹,月面聯(lián)暗反差會(huì)有所改善���,故可惜助于第外 敏感養(yǎng)緒衛(wèi)星定姿.那么什么是鷺外敏感器呢����?
崇外敏牌器是盛精外浚國(guó)通過(guò)對(duì)天悴的觀測(cè)獲得就天器 姿態(tài)宿慮的棒感器?紫外敏感器的工作披段一艇選在對(duì)地球 和恒星觀測(cè)均較為有利的260-300 nm.它可以同時(shí)觀測(cè)
10�����、多個(gè) 天體目標(biāo)*能怫握供三抽的航天器姿態(tài)信息.其優(yōu)點(diǎn)是休積和 廈■小���,無(wú)可動(dòng)機(jī)構(gòu)’利于艮期運(yùn)行��,具有多種繼曙器的功能���, 它蔣來(lái)攝有可能盛為統(tǒng)天器賽命測(cè)■的主翌敏感器.對(duì)于地 形AEV.V,的面租值.則A<0,氣體時(shí)外界做功,如兩個(gè)fii積 相等���,則A-0,氣協(xié)不做功.同理,對(duì)于初��、末狀?yuàn)輩f(xié)積確 足VA>VB的悄況��,也<±1£三種可能.
實(shí)際上�����,一個(gè)多冇過(guò)穆中系境対外所做的功可氐我尿?yàn)?時(shí)=吾����。"一凸%*苫<匚-丁4 ⑥
梵中n為參方指數(shù)?可以取一8-4*之同的枉何值 為普適氣律常■?各單方{等值】過(guò)程的事方指數(shù)分別為:等溫 過(guò)理rt-K等壓過(guò)程冷=0*尊容過(guò)程H-g.可見*氣律經(jīng)歷窯
11�����、方蠻化過(guò)程時(shí)�����,泵統(tǒng)對(duì)外所做的功不僅與慕統(tǒng)冶末狀態(tài)有關(guān), 還與氣休在世一過(guò)糅中的參方措數(shù)有關(guān)+
四屆結(jié)
根據(jù)上面的分折�,可以得出以下結(jié)論:
球紫外敢感益的研究始見于19^2年芙國(guó)的Hmwyw訶公司 的 ERADS(Each Reference Atttude Determination System),隨 后199E年NASA God—dard空何飛行中心硏制萌基于軸利 敵肘的紫外地球亀屈器也進(jìn)廳了禱戟應(yīng)驗(yàn).但墨對(duì)于月球衛(wèi) 星便用紫外晝態(tài)敏愍器至今未見報(bào)趙�����,因此便用皓外月球救 感器定套是我國(guó)在世界上的首創(chuàng).
初嫦嬢一號(hào)”上的紫外月球嫩恿器的工柞麻理是:借助月 面的紫外輻射時(shí)月球表面進(jìn)齊威
12��、傑.采用折轉(zhuǎn)反肘備和大視 場(chǎng)成像物撬繪舍構(gòu)嵐的復(fù)舍曲光舉系蜒完成對(duì)月煤邊篦的攝 取”折轉(zhuǎn)反肘撓分布于B牛視場(chǎng)方怕�����,用S梗鎮(zhèn)外反射面實(shí)理 8牛視場(chǎng)的履合 在光學(xué)頭部拍搔到月球影障后在CCD上成 像丫由軟件跡圖慷進(jìn)打處理和識(shí)別.槍閩出月球圓盤邊竦+確 定月心矢蠱方向�����,并應(yīng)用姿態(tài)處理算拡計(jì)算岀衛(wèi)星姿態(tài)*戟感 器采用光學(xué)難璃和光學(xué)晶揮的配Sb設(shè)計(jì)這到國(guó)際先進(jìn)水平* 視場(chǎng)可達(dá)到150 ?<在境月軌道上看月球��,所需的視場(chǎng)角鱷 130度h工件譜段:360-4BD nm,中心菠怪:4朗nrh|軟件數(shù)據(jù) 處理時(shí)間為1秒胖*完全可収達(dá)到執(zhí)行枉務(wù)的長(zhǎng)求.
M月29 B 18吋0]分 翻秒J蜿嬤一號(hào)"衛(wèi)星弟3桃變
13����、軌嵐功’開姑圍驍?shù)厍蜣D(zhuǎn)最后一圈.在這一軌殖上+星上搭載 的蕈外敏感器擇機(jī)開蠟對(duì)地球和月球成燥山1日17時(shí) 餉分. “橢嫩一號(hào)"衛(wèi)星迪功實(shí)施入軌后的第四出變軌’艱利進(jìn)人地 月轉(zhuǎn)移軌道�,開始飛向月球.
利用就外月球敏擢器給探月衛(wèi)星定姿是在國(guó)科學(xué)家的首 創(chuàng)■這也是對(duì)胡郵濤總書記在f七大報(bào)告中提出的“提高自主 創(chuàng)新能力w的貝體休現(xiàn)相信它可以確諜衛(wèi)星繞月時(shí)始坯處于 最佳的工作軽態(tài).
祝眼我門的“嫌蛾 號(hào)”一切順利���,早日宦回月球的相關(guān) 宿息’團(tuán)中華民機(jī)的干年夢(mèng)想!
門〉若理想氣休經(jīng)歷單方變純等溫�、純等壓或純等容 過(guò)稈人別有“豈棒體輕不變,不魅功”體積變大'氣悴對(duì)外劃 功豐悴職變小'外界対氣體撇功「
若理想氣祥經(jīng)歷爭(zhēng)方(宜雜)變憂�,則豈怵體積不變, 但吒捧與外界仍有機(jī)械功*而且功的正負(fù)與過(guò)程的方向有關(guān)* 吒律體積變化(不論變大還是變小“和有三種可能情況*不做 功,代體肘外嫌功或外界對(duì)咒體傲功*
雖然中學(xué)物理敕學(xué)對(duì)汽怵參方過(guò)思不齊養(yǎng)求.只研靈單 方過(guò)程*但藪那也要特別注盍引導(dǎo)學(xué)生充分認(rèn)識(shí)到��,在單方過(guò) 程研究中譜到的規(guī)律只適合單方過(guò)稈���,埋過(guò)了這牛范團(tuán)規(guī)律 就可齟不適用了.也就是說(shuō)*對(duì)枉何物理規(guī)律都要洼査其庭立 條件和便用范圉一
| 維普資訊 h ttp://
| 維普資訊 h ttp://
 準(zhǔn)靜態(tài)過(guò)程氣體體積變化與做功的關(guān)系
準(zhǔn)靜態(tài)過(guò)程氣體體積變化與做功的關(guān)系