《UG運(yùn)動(dòng)仿真運(yùn)動(dòng)分析》由會(huì)員分享���,可在線閱讀���,更多相關(guān)《UG運(yùn)動(dòng)仿真運(yùn)動(dòng)分析(7頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1、
運(yùn)動(dòng)分析
對(duì)原來的三維實(shí)體模型完成了連桿特性的設(shè)置���,運(yùn)動(dòng)副的建立和外載荷的添加的前置處
理后���,就完成了運(yùn)動(dòng)模型的構(gòu)建。此時(shí)可以利用 UG/Motion運(yùn)動(dòng)分析工具欄���,對(duì)創(chuàng)建的運(yùn)動(dòng)
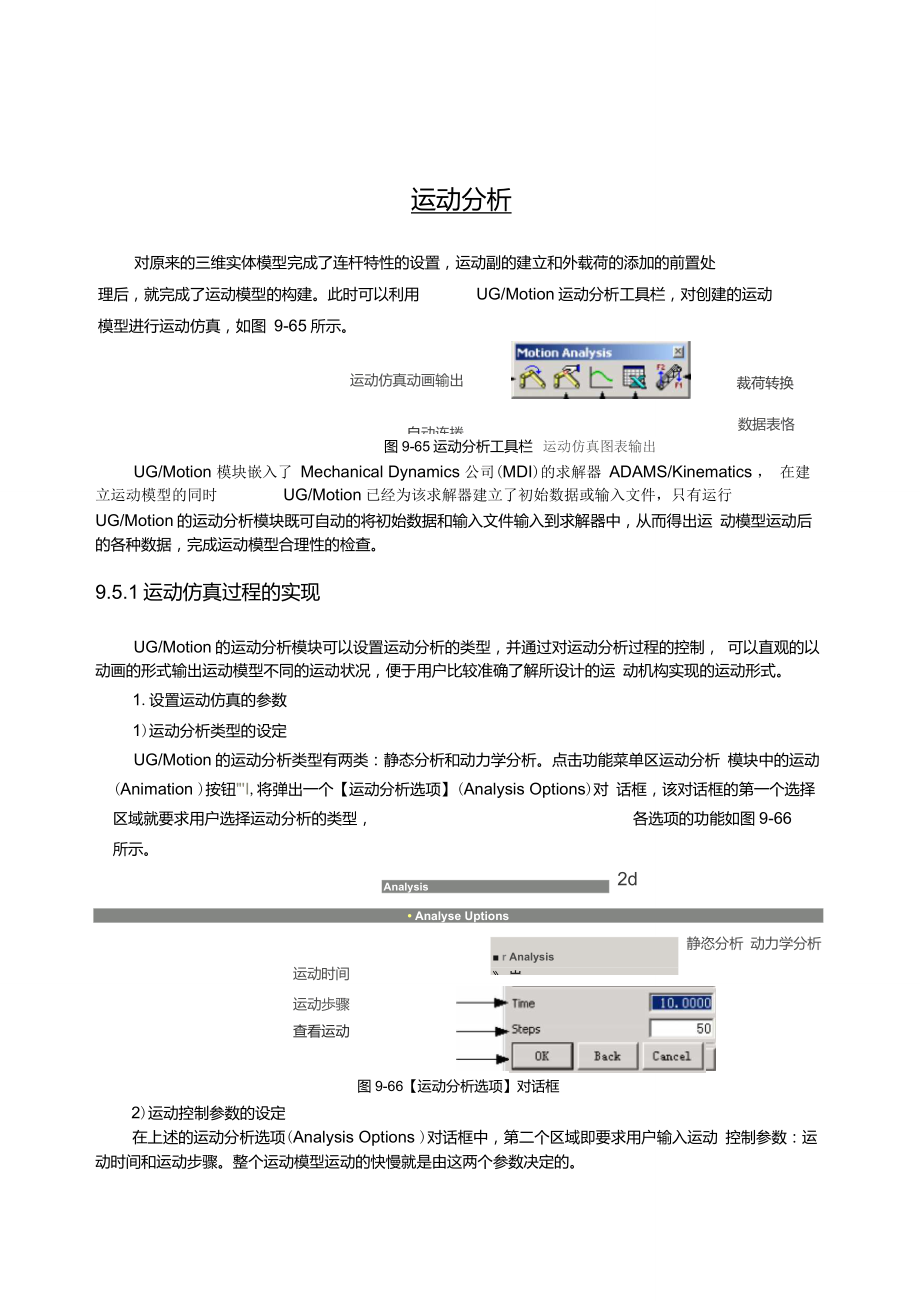
模型進(jìn)行運(yùn)動(dòng)仿真���,如圖 9-65所示。
運(yùn)動(dòng)仿真動(dòng)畫輸出
自動(dòng)連捲
運(yùn)動(dòng)仿真圖表輸出
裁荷轉(zhuǎn)換
數(shù)據(jù)表恪
圖9-65運(yùn)動(dòng)分析工具欄
UG/Motion 模塊嵌入了 Mechanical Dynamics 公司(MDI)的求解器 ADAMS/Kinematics ���, 在建立運(yùn)動(dòng)模型的同時(shí) UG/Motion已經(jīng)為該求解器建立了初始數(shù)據(jù)或輸入文件���,只有運(yùn)行
UG/Motion的運(yùn)
2、動(dòng)分析模塊既可自動(dòng)的將初始數(shù)據(jù)和輸入文件輸入到求解器中���,從而得出運(yùn) 動(dòng)模型運(yùn)動(dòng)后的各種數(shù)據(jù)���,完成運(yùn)動(dòng)模型合理性的檢查���。
9.5.1運(yùn)動(dòng)仿真過程的實(shí)現(xiàn)
UG/Motion的運(yùn)動(dòng)分析模塊可以設(shè)置運(yùn)動(dòng)分析的類型,并通過對(duì)運(yùn)動(dòng)分析過程的控制���, 可以直觀的以動(dòng)畫的形式輸出運(yùn)動(dòng)模型不同的運(yùn)動(dòng)狀況���,便于用戶比較準(zhǔn)確了解所設(shè)計(jì)的運(yùn) 動(dòng)機(jī)構(gòu)實(shí)現(xiàn)的運(yùn)動(dòng)形式。
1.設(shè)置運(yùn)動(dòng)仿真的參數(shù)
1)運(yùn)動(dòng)分析類型的設(shè)定
UG/Motion的運(yùn)動(dòng)分析類型有兩類:靜態(tài)分析和動(dòng)力學(xué)分析���。點(diǎn)擊功能菜單區(qū)運(yùn)動(dòng)分析 模塊中的運(yùn)動(dòng)(Animation )按鈕"'I,將彈出一個(gè)【運(yùn)動(dòng)分析選項(xiàng)】(Analysis Options)對(duì)
3���、話框,該對(duì)話框的第一個(gè)選擇區(qū)域就要求用戶選擇運(yùn)動(dòng)分析的類型���, 各選項(xiàng)的功能如圖9-66
2d
所示。
Analysis
? Analyse Uptions
■ r Analysis
? 岸 Kinematic/Dynamic Analysis
靜恣分析 動(dòng)力學(xué)分析
運(yùn)動(dòng)時(shí)間
運(yùn)動(dòng)歩驟
查看運(yùn)動(dòng)
圖9-66【運(yùn)動(dòng)分析選項(xiàng)】對(duì)話框
2)運(yùn)動(dòng)控制參數(shù)的設(shè)定
在上述的運(yùn)動(dòng)分析選項(xiàng)(Analysis Options )對(duì)話框中���,第二個(gè)區(qū)域即要求用戶輸入運(yùn)動(dòng) 控制參數(shù):運(yùn)動(dòng)時(shí)間和運(yùn)動(dòng)步驟���。整個(gè)運(yùn)動(dòng)模型運(yùn)動(dòng)的快慢就是由這兩個(gè)參數(shù)決定的���。
2 ?運(yùn)動(dòng)仿真過程的動(dòng)畫輸出及控制
4、1)運(yùn)動(dòng)仿真過程的控制
設(shè)置完了運(yùn)動(dòng)分析的參數(shù)后���,若選擇的運(yùn)動(dòng)分析類型為靜態(tài)分析點(diǎn)擊 0K鍵���,將彈出
個(gè)【靜態(tài)平衡】(Static Equilibrium )對(duì)話框,如圖9-67所示���。
Packaging Options
廠 Measire
廠 Trace
I 曲也卄柯牡門口
Tracing and View Creation
Iodate Des^n 隔iiicn
圖9-67【靜態(tài)平衡】對(duì)話框
若選擇的運(yùn)動(dòng)分析類型為動(dòng)力學(xué)分析點(diǎn)擊 0K鍵���,將彈出一個(gè)【運(yùn)動(dòng)過程】
對(duì)話框,對(duì)話框各選項(xiàng)的功能如圖 9-68所示���。
(Animation )
運(yùn)動(dòng)步驟顯示
運(yùn)動(dòng)步
5���、驟顯示
當(dāng)前運(yùn)動(dòng)步驟顯示
當(dāng)前運(yùn)動(dòng)步驟顯示
運(yùn)動(dòng)控制選項(xiàng)
運(yùn)動(dòng)控制選項(xiàng)
包裝選項(xiàng)
包裝選項(xiàng)
運(yùn)動(dòng)軌跡S艮蹤
運(yùn)動(dòng)軌跡S艮蹤 觀圖創(chuàng)建
觀圖創(chuàng)建
圖9-68【運(yùn)動(dòng)過程】對(duì)話框
對(duì)運(yùn)動(dòng)過程控制的功能主要是由運(yùn)動(dòng)控制選項(xiàng)來實(shí)現(xiàn)的,下面來介紹一下運(yùn)動(dòng)控制選項(xiàng) 區(qū)域各個(gè)按鈕的功能���。
全程控制按鈕(Full Range 一I
單擊該按鈕可以查看運(yùn)動(dòng)模型在設(shè)定的時(shí)間和步驟內(nèi)的整個(gè)連續(xù)的運(yùn)動(dòng)過程���,在繪圖區(qū) 以動(dòng)畫的形式輸出���。
前進(jìn)控制按鈕(Step Forward)
單擊該按鈕可以使運(yùn)動(dòng)模型在設(shè)定的時(shí)間和步驟限制范圍內(nèi)向前運(yùn)動(dòng)一步,方便用戶查 看運(yùn)動(dòng)模型下一個(gè)運(yùn)動(dòng)步驟的狀態(tài)���。
6���、
后退控制按鈕(Step Forward) “
單擊該按鈕可以使運(yùn)動(dòng)模型在設(shè)定的時(shí)間和步驟限制范圍內(nèi)向后運(yùn)動(dòng)一步,方便用戶查 看運(yùn)動(dòng)模型上一個(gè)運(yùn)動(dòng)步驟的狀態(tài)���。
設(shè)計(jì)位置按鈕(Design Position)
單擊該按鈕后可以使運(yùn)動(dòng)模型回到未進(jìn)行運(yùn)動(dòng)仿真前置處理的初始三維實(shí)體設(shè)計(jì)狀態(tài)���。
裝配位置按鈕(Assembly Position)
ADAMS運(yùn)動(dòng)分析模型
單擊該按鈕后可以使運(yùn)動(dòng)模型回到進(jìn)行了運(yùn)動(dòng)仿真前置處理后的 的狀態(tài)。
3 ?運(yùn)動(dòng)仿真過程的跟蹤記錄 在運(yùn)動(dòng)分析中用戶可以很精確的得到運(yùn)功模型在運(yùn)動(dòng)的各個(gè)場(chǎng)景中的數(shù)據(jù)���,但是同時(shí)運(yùn) 動(dòng)分析模塊還給用戶提供了一個(gè)更為直觀的觀察運(yùn)動(dòng)
7���、模型在運(yùn)動(dòng)過程中前后變化的工具。在
Animation (運(yùn)動(dòng)過程控制)對(duì)話框中點(diǎn)擊圖標(biāo) 如圖9-69所示���。
Trace Entire Mechanism可以實(shí)現(xiàn)該功能,
Number oF S^eps
Currisrt Step
通過多次單擊前進(jìn)控制按鈕(Step Forward)丄■!���,使運(yùn)動(dòng)模型向前一步一步的運(yùn)動(dòng),用戶想
查看運(yùn)動(dòng)模型某一個(gè)運(yùn)動(dòng)步驟的狀態(tài)與原始狀態(tài)的相對(duì)變化時(shí)���,就可以在運(yùn)動(dòng)模型一步一步
的運(yùn)動(dòng)該步驟時(shí)���,在該對(duì)話框中選擇選項(xiàng) Update Design Position,系統(tǒng)將會(huì)自動(dòng)顯示該運(yùn)動(dòng) 步驟下模型的狀態(tài)���,同時(shí)保留模型的原始狀態(tài)���。 如
8、圖9-70所示���,單擊該控制按鈕使運(yùn)動(dòng)模型 從第0步運(yùn)動(dòng)到第27步���,系統(tǒng)將在屏幕上靜態(tài)的顯示第 1步和第27步時(shí)運(yùn)動(dòng)模型各零部件 的狀態(tài)。
Ti■已匚ing and View Creation
第0步時(shí)餉位盲 .第殲歩時(shí)的位直
圖9-70完成運(yùn)動(dòng)過程的跟蹤記錄
4 ?運(yùn)動(dòng)仿真動(dòng)畫文件輸出
在運(yùn)動(dòng)場(chǎng)景導(dǎo)航窗口中選中一個(gè)場(chǎng)景���,單擊鼠標(biāo)右鍵之后將會(huì)彈出一個(gè)右鍵快捷菜單���, 在該菜單中選擇菜單項(xiàng) Export,將會(huì)顯示UG/Motion給用戶提供的幾種動(dòng)畫輸出的格式���,如
圖9-71所示。
巨沖旅 H MPEG,,.
Animated GIF...
VRMLm.
圖9-7
9���、1選擇輸出動(dòng)畫文件格式
在各種動(dòng)畫輸出格式中選擇 MPEG將可以輸出一個(gè) mpg文件���,選擇Animated GIF格式將會(huì)
輸出一個(gè)gif文件。不論選擇那一種格式���,系統(tǒng)都將彈出動(dòng)畫文件設(shè)置對(duì)話框���,如圖 9-72所
示。
Camera Path
圖9-72動(dòng)畫文件設(shè)置對(duì)話框
在該對(duì)話框中用戶可以看到該文件的默認(rèn)名稱���, 動(dòng)畫的幀數(shù)���,如果用戶要自定義文件名,
則可選擇選項(xiàng) Specify File Name ;如果用戶要查看動(dòng)畫���,可選擇選項(xiàng) Preview Animation���,系 統(tǒng)將會(huì)自動(dòng)打開【預(yù)覽動(dòng)畫控制】對(duì)話框���,如圖 9-73所示���。單擊該對(duì)話框中的圖標(biāo) __1
10、可實(shí)
現(xiàn)對(duì)輸出動(dòng)畫的連續(xù)播放���。
Preview AnlnnaOon
nrane 斤aneo
Options
l? N H kH
圖9-73【預(yù)覽動(dòng)畫控制】對(duì)話框
9.5.2運(yùn)動(dòng)分析結(jié)果的圖表輸出
ADAMS求解器根據(jù)運(yùn)動(dòng)模型的各項(xiàng)參數(shù)計(jì)算出運(yùn)動(dòng)模型在各個(gè)步驟的數(shù)據(jù)���,不但可以 以動(dòng)畫的形式輸出運(yùn)動(dòng)分析的結(jié)果,還可以直接以圖表的形式輸出各個(gè)數(shù)據(jù)���。 UG/Motion該
項(xiàng)功能主要是利用外掛的 Microsoft Excel軟件的功能實(shí)現(xiàn)的���。
點(diǎn)擊功能菜單區(qū)運(yùn)動(dòng)分析模塊中的圖表( Graphing)按鈕一,將彈出一個(gè)【運(yùn)動(dòng)時(shí)間
和步驟設(shè)置】(Analysis O
11���、ptions)對(duì)話框���,如圖9-74所示���。
Analysis
運(yùn)動(dòng)時(shí)間
圖9-74運(yùn)動(dòng)時(shí)間和步驟設(shè)置對(duì)話框
與運(yùn)動(dòng)控制參數(shù)的設(shè)置相同,輸入一定的運(yùn)動(dòng)時(shí)間和運(yùn)動(dòng)步驟后���, ADAMS求解器將自
動(dòng)根據(jù)運(yùn)動(dòng)模型的參數(shù)和運(yùn)動(dòng)控制參數(shù)來計(jì)算運(yùn)動(dòng)模型在各步運(yùn)動(dòng)狀態(tài)下的數(shù)據(jù)���。求解器計(jì) 算完成后將彈出一個(gè)【圖表設(shè)置】 (Defi ne Graph)對(duì)話框,用戶可以在該對(duì)話框中根據(jù)需要
設(shè)置所要顯示數(shù)據(jù)的屬性和類型���,該對(duì)話框各選項(xiàng)的功能說明如圖 9-75所示���。
Joints and Markert
Define Graph
>-Y-Axfs
團(tuán)表待輸 出數(shù)據(jù)的 屬性
Axis D
12、efinition
loisplacemert 二
Value
lagmitude
Velocity Accelerabo n
Force
圖弟
步碌型
? Reference Frame
(? RalfOwe C Absolute
Defined Coves
已定義待—?麗 輸出的圖
夷歹H表
Cfcplacenngnt
Naire
參馥特顯 示的物體 名稱輸入
框
■^■|Urrtit ltd
+1X1 Ej
| OK | Baek
圖9-75【圖表設(shè)置】對(duì)話框
用戶可以在運(yùn)動(dòng)模型所設(shè)立的運(yùn)動(dòng)副和載荷列表框中選擇所要考察的對(duì)象���,然后設(shè)定所 需輸出的數(shù)據(jù)的屬性���,參考類型(工作坐標(biāo)系下的值 Relative或絕對(duì)坐標(biāo)系下的值 Absolute), 單擊加入(Add )鍵后即已將其加入到了已定義待輸出的圖表列表框中了���。按照相同的方法 可以加入一系列數(shù)據(jù)屬性不同的考察對(duì)象���,應(yīng)用后 UG將自動(dòng)調(diào)用Microsoft Exceed將這些
數(shù)據(jù)以圖表的形式在 Exceed中輸出���,如圖9-76所示。
圖9-76數(shù)據(jù)表格
同時(shí)���,外掛軟件 Microsoft Exceed將會(huì)根據(jù)這個(gè)數(shù)據(jù)表格���,自動(dòng)繪制出一條變化曲線, 如圖9-77所示���。
圖9-77變化曲線
 UG運(yùn)動(dòng)仿真運(yùn)動(dòng)分析
UG運(yùn)動(dòng)仿真運(yùn)動(dòng)分析